O RR-1, um robô explorador leve, mediu os níveis de radiação, filmou o interior do Reator nº 4 e apontou as áreas mais perigosas. Onde não conseguiu penetrar, seu “colega” com lagarta, o RR-G1, realizou as missões.

STR-1 em Chernobyl.
Ígor Kostin/SputnikTratores robóticos pesados Beloiarets, TR-1 e de outros tipos operaram na área do acidente nuclear para desativar as áreas contaminadas.

Máquinas finlandesas teledirigidas em operação em Chernobyl.
Ígor Kostin/SputnikOs resultados mais notáveis foram obtidos pelo complexo robótico Klin-1, composto por duas máquinas especiais montadas no chassi de um tanque T-72. O veículo, controlado remotamente por um motorista-mecânico e um operador, limpou detritos e coletou resíduos radioativos.

Testes com trator DET-250.
Valéri Zufarov/TASSO STR-1 de titânio também provou seu valor. Tecnologias espaciais foram utilizadas em seu desenvolvimento. Seu chassi, por exemplo, era emprestado das sondas lunares.

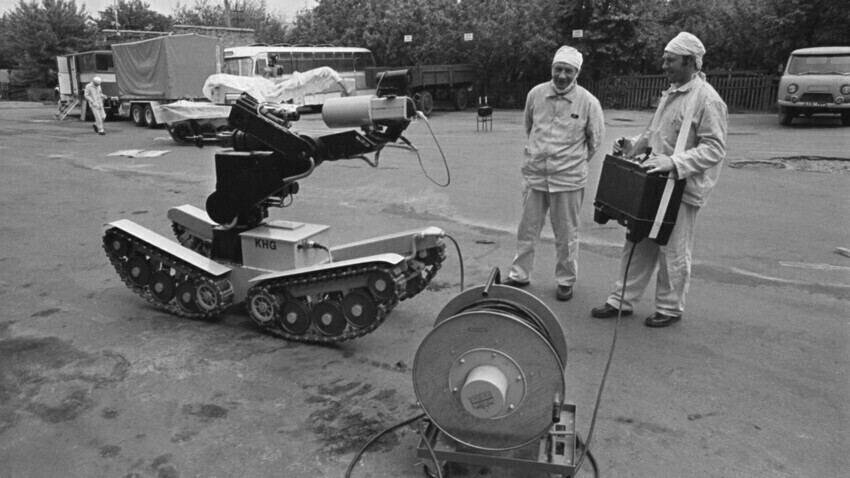
Robô projetado na RFA operando em Chernobyl.
Ígor Kôstin/SputnikRobôs alemães e japoneses também foram utilizados, porém não obtiveram tanto sucesso em suas operações.
LEIA TAMBÉM: Por que o poder soviético se calou diante de Chernobyl?
O Russia Beyond está também no Telegram! Para conferir todas as novidades, siga-nos em https://t.me/russiabeyond_br
Autorizamos a reprodução de todos os nossos textos sob a condição de que se publique juntamente o link ativo para o original do Russia Beyond.
Assine
a nossa newsletter!
Receba em seu e-mail as principais notícias da Rússia na newsletter:

